A novel version of Atomic Force Microscopes (AFMs), named as Trolling Mode AFM (TR-AFM), was investigated from the dynamic and stress points of view during manipulation process of Nano/Bio particles. TR-AFM has been utilized as a Nano Robot. After determining the manipulation algorithm for a highly adhesive bio particle, Lumped and Distributed governing equations of TR-AFM have been derived. To evaluate the derived equations, similar Modal and Transient Structural analyses of the system have been accomplished both analytically and by ANSYS software. Moreover, Contact Mechanics of adhesive surfaces of Bio particles with TR-AFM tips has been deeply investigated. At the end, the process has been controlled using a Neural Network and other controllers.
Project members: Seyedeh Zahra Mohammadi
Supervisors: Prof. Majid Mohammadi Moghadam and Prof. Hossein Nejat Psihkenari.
Publication: 1- S. Zahra Mohammadi, Majid Moghadam, Hossein Nejat Pishkenari, “Dynamical modeling of manipulation process in Trolling-Mode AFM”, Ultramicroscopy, 197(2019), pp: 83-94. https://doi.org/10.1016/j.ultramic.2018.11.017.
2- S. Zahra Mohammadi, Hossein Nejat Pishkenari, Majid Moghadam, “3D Distributed Modeling of Trolling-Mode AFM During 2D Manipulation of a Spherical Cell”, Journal of Nanoparticle research 23, 99 (2021). https://doi.org/10.1007/s11051-021-05189-2.
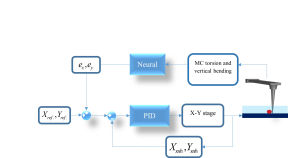
3- S. Zahra Mohammadi, Hossein Nejat Pishkenari, Majid Moghadam, “Controlled manipulation of a bio‑particle using trolling mode atomic force microscope: a simulation study”, Journal of Nanoparticle research, 23, 221 (2021). https://doi.org/10.1007/s11051-021-05301-6

HTML Editor