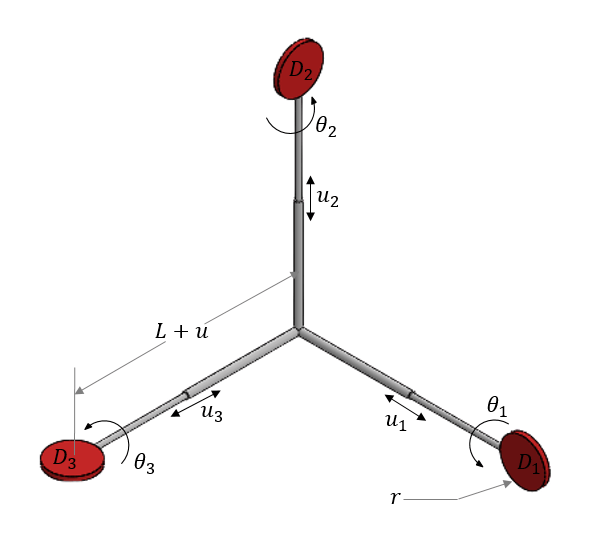
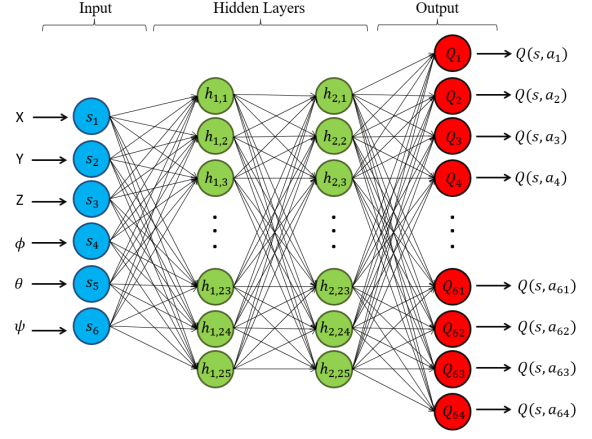
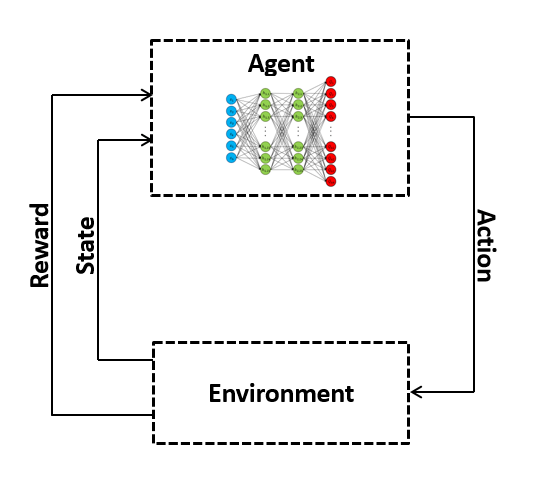
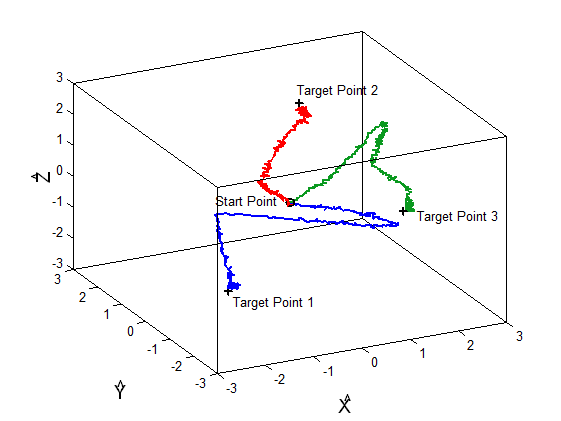
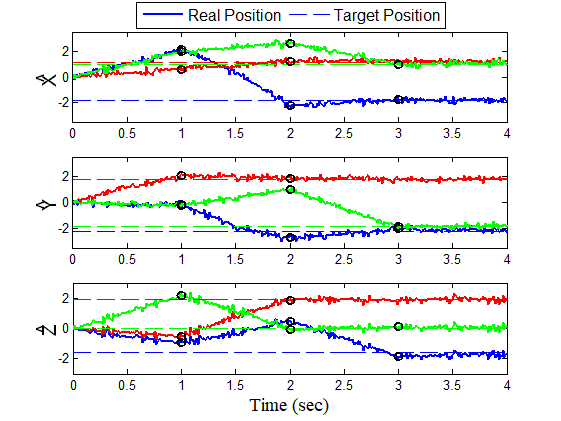
Artificial Intelligence (AI) is a novel and fascinating tool in the control of robots. In this study, using a deep reinforcement learning approach, we have trained an artificial three-disk microrobot in order to learn how to swim at low Reynolds number flow (𝑹𝒆 ≪ 𝟏) like the behavior of young microorganisms. Here, as the first contribution, we introduced a discrete model of a novel microswimmer. As the second contribution, we demonstrated that, using the proposed intelligent method, the microswimmer will be able to not only escape the physical constraints of swimming in a viscous medium, but also find the best sequence of actuation to reach the target point in a stochastic environment. The proposed deep reinforcement learning strategy can be applied to any other type of self-propelled microswimmers consisting of disks and actuators, which swim with continuous state space in a perturbed environment. In the end, we investigated the effect of learning hyperparameters on the performance of the swimmer’s training, and showed that, in the current agent and environment, the optimal values for the discount factor 𝜸 and learning rate 𝜶 are 0.7 and 0.001 respectively which should be properly set for other types of mechanisms and environments.
Project members: Hossein Abdi
Publication: Abdi, H., H. Nejat Pishkenari. " Self-Learning Swimming of a Three-Disk Microrobot in a Viscous and Stochastic Environment using Deep Reinforcement Learning." Engineering Applications of Artificial Intelligence.

AI Website Builder