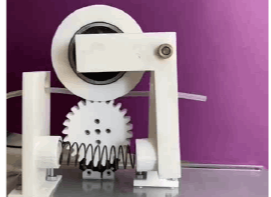
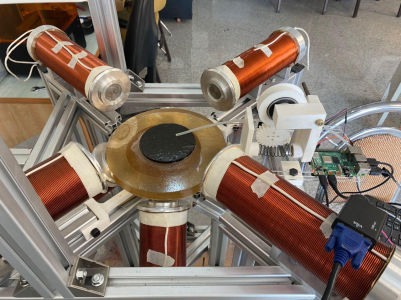
The aim of this project is to design and build a linear robotic arm guide which is part of a major project to design and build a magnetic control system for a continuous robotic arm. The continuous robotic arm is known as a catheter with applications in diagnosis, treatment, and minimally-invasive surgeries. The advancer has one degree of freedom that can control the length of the arm that is inserted into workspace. The orientation of the catheter tip is controlled by a magnetic field, and the linear advancer controls the length of the arm that enters the field. For this purpose, first the mechanism is designed and made by 3D printing method. In the next step, the movement of the arm, in the form of an open loop, is controlled using a servo motor and a Raspberry Pi.
Project members: Kimia Forghani

Offline Website Builder