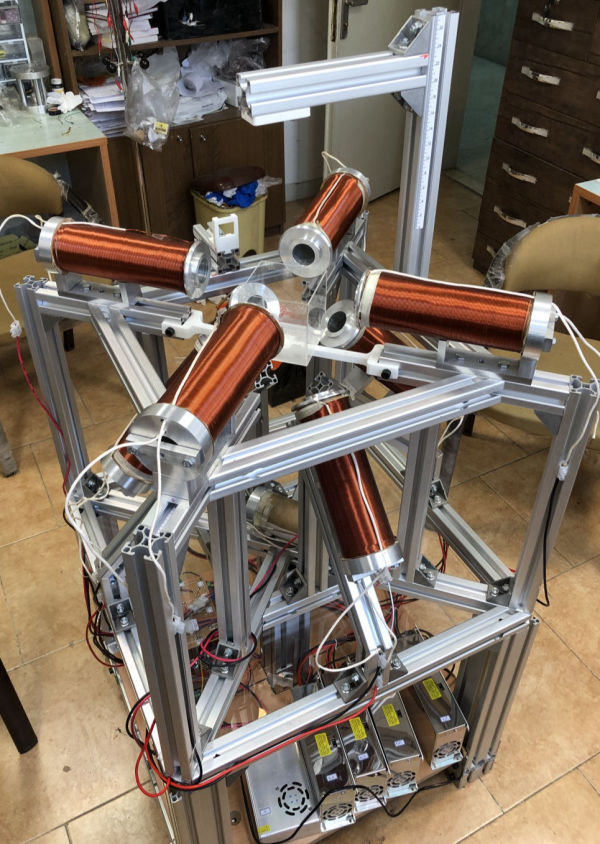
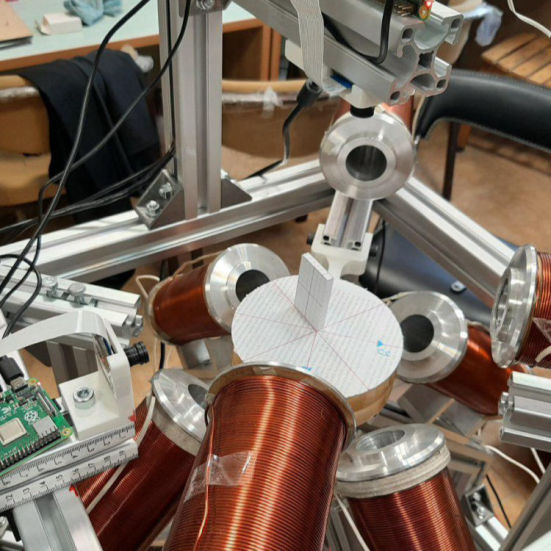
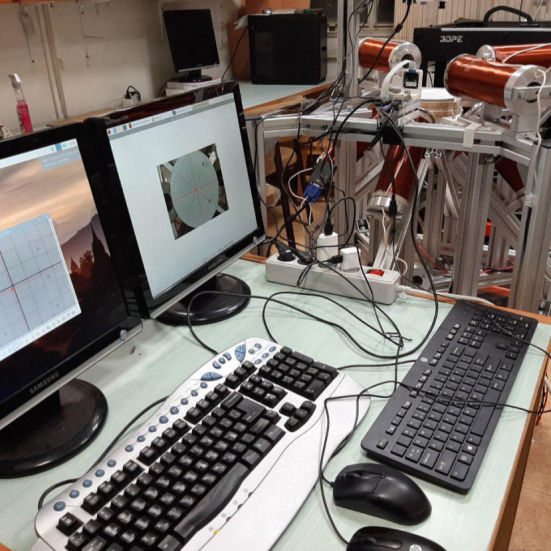
Due to the dimensional limitations, placing the actuator on the microbots is a very difficult task. Therefore, external stimuli such as electric field or magnetic field are often used to stimulate the microbots. In order to build magnetic fields in this system, 9 coils with a high saturation ferromagnetic core are used, that results in the desired magnetic field and gradient at the desired point, and the produced field by three-axis calibrated magnetometer sensors has been measured. These 9 coils are placed on a strong skeleton which, in addition to having the tolerance for the heavy weight of these coils, it has been designed to be as modular as possible to be easily modified according to the intended use. For example, the location of its coils can be changed to some extents. The system is capable to produce a field of at least 30 mT in three dimensions at the center of the workspace and the size of the workspace is a sphere with a radius between 14 and 30 cm. There are 2 cameras with the image processing system on this structure for locating controllable components such as Micro/Nano robots. At the end of the thesis, a robotic arm is designed to control the angle of the coils from the horizon.
Project members: Mobin Abdar Esfahani, Hadiseh Amiri

HTML Editor