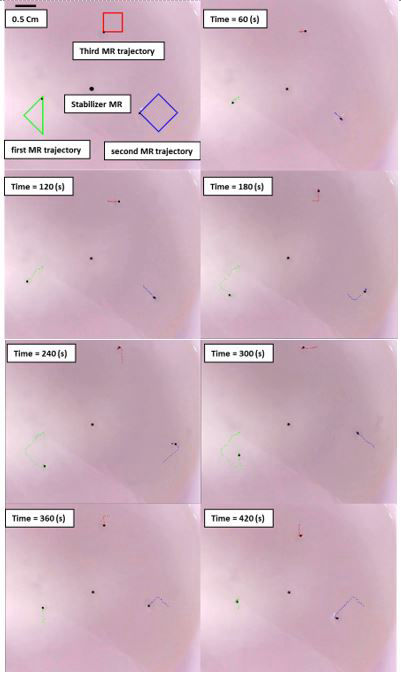
In the current study we’ve improved the system’s stability by adding a larger MR (stabilizer MR). This MR can be moved all around the workspace and works as a moving internal magnetic field source. We illustrate simultaneous and independent control of multiple MRs by simulation and show the benefits of using the stabilizer MR (more than 20 percent reduction in tracking error and control effort). In addition, we evaluate experimentally our proposed method to independently control the position of three MRs using a stabilizer MR demonstrating the efficacy of the strategy.
Project members: Ruhollah Khalesi

Offline Website Maker