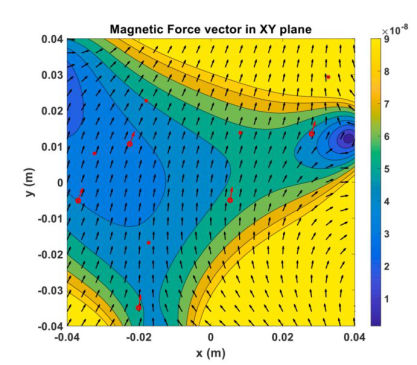
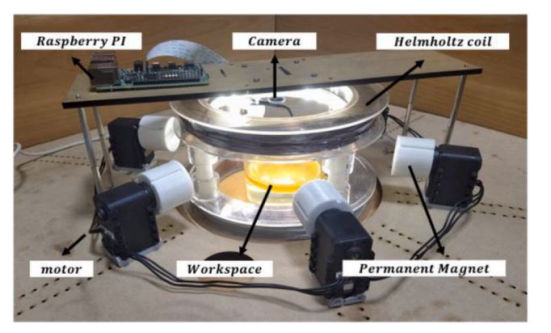
We have proposed a system for simultaneous and independent control of the position of multiple MRs in a plane. The system consists of 2N permanent magnets (PMs) with a circular arrangement in the plane around the workspace and a pair of Helmholtz coil to control N MRs. PMs are rotated by servomotors, and the coil aligns the orientation of the MRs normal to the plane. A sliding mode controller, as a robust approach, is designed to eliminate the undesired effects of disturbances and uncertainties. The position control of three MRs with dimensions of 250 µm, and a maximum speed of 330 µm/s is experimentally demonstrated using this controller.
Project members: Ruhollah Khalesi, Masoud Yousefi
Publication:
Khalesi, Ruhollah, et al. "Robust independent and simultaneous position control of multiple magnetic microrobots by sliding mode controller." Mechatronics 84 (2022): 102776.

Landing Page Creator