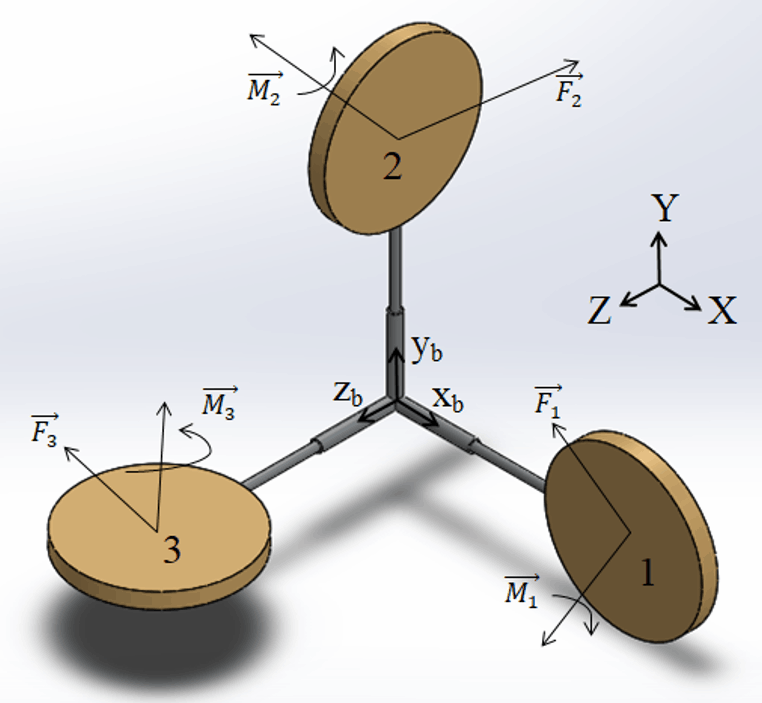
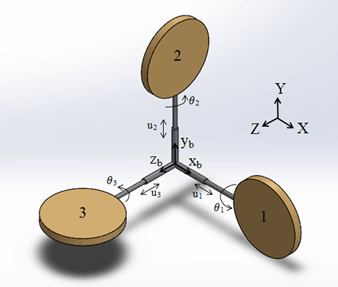
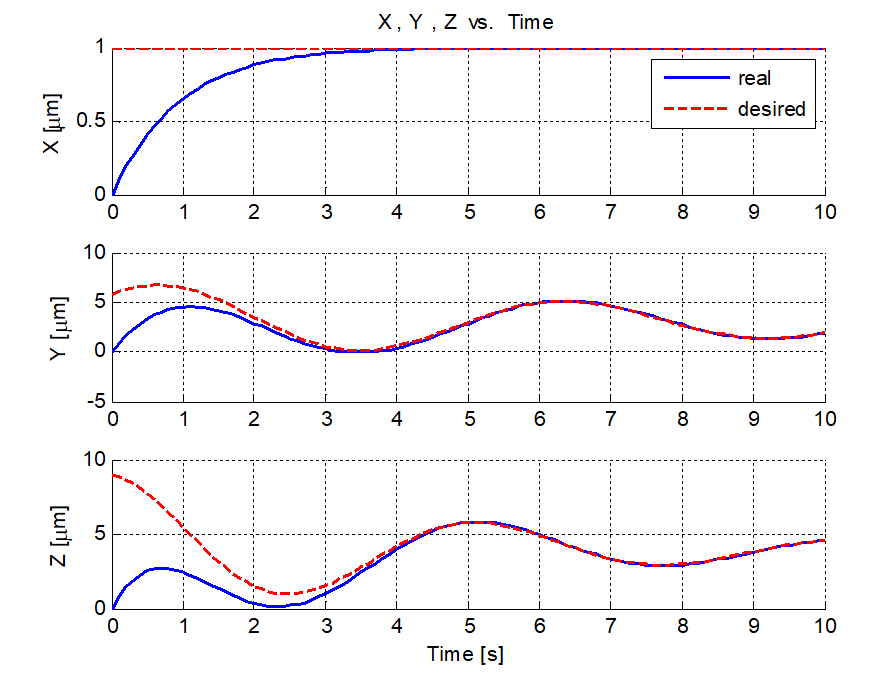
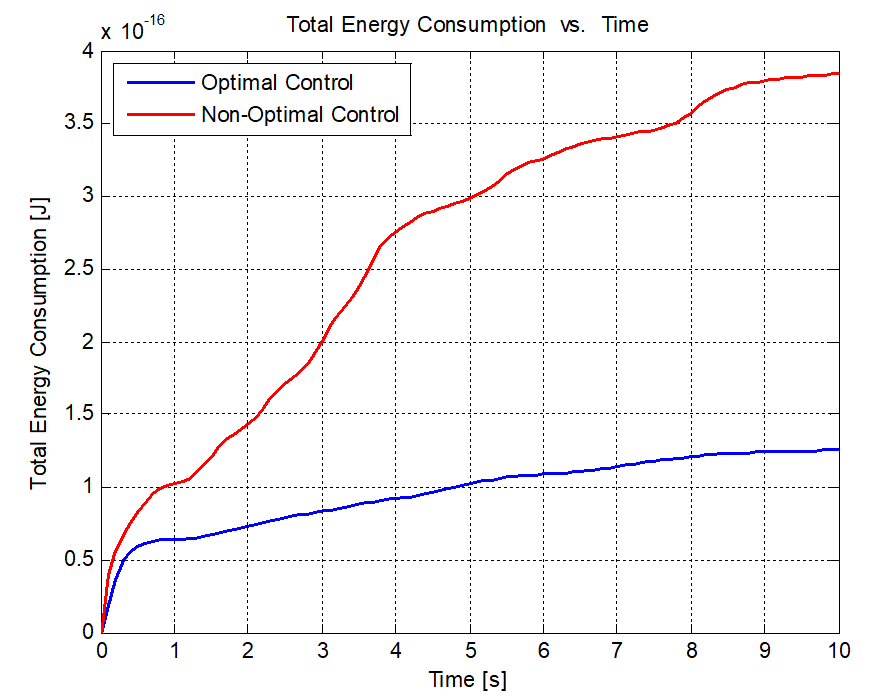
Micro-robots can be used in a wide range of applications such as medical, manufacturing, and military. Nowadays, due to technological problems, studies on micro-robots have been often limited to control of the magnetized micro-particles by an external magnetic field. So, studies on self-propelled micro-robots (with integrated actuators and sensors) are often limited. So there are many opportunities for researching on such micro-robots. In this study, the dynamic modeling of a high maneuverable micro-robot (consisting of three prismatic and three rotary actuators), swimming in a low Reynolds fluid has been presented, and also the hydrodynamic effects of micro-robots on the flow field are modeled, and also its interaction on other parts of the micro-swimmer are modeled by a linear velocity vector and a vorticity vector. Then, an optimal controller to decrease energy consumption of actuators has been presented. Finally, it has been shown that the total energy consumption relative to a non-optimal controller, has been reduced more than 67%.
Project members: Hossein Abdi
Publication: Abdi, H., Pishkenari, H. N. "Optimal Control of a High Maneuverable Micro-Swimmer in Low Reynolds Number Flow to Reduce Energy Consumption." 7th International Conference on Robotics and Mechatronics (ICRoM), pp. 110-113. IEEE, 2019

No Code Website Builder