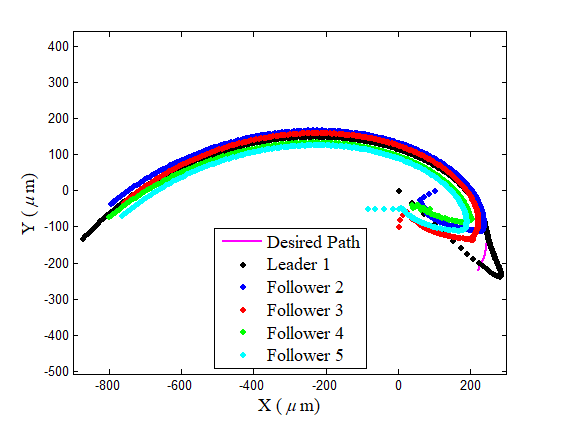
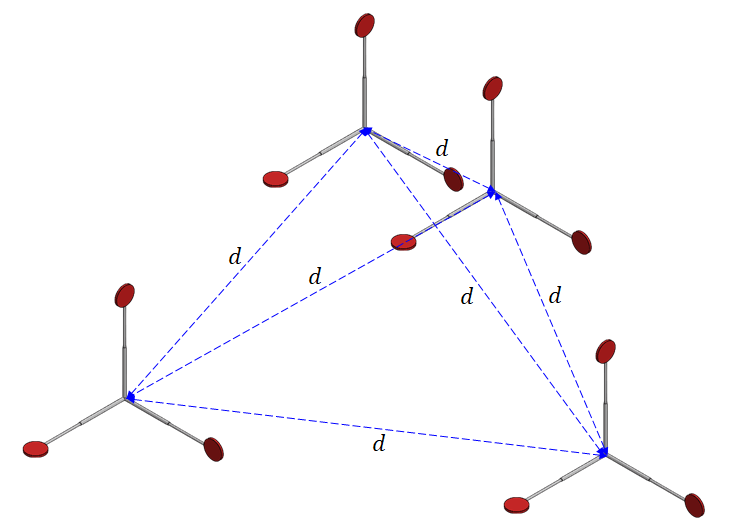
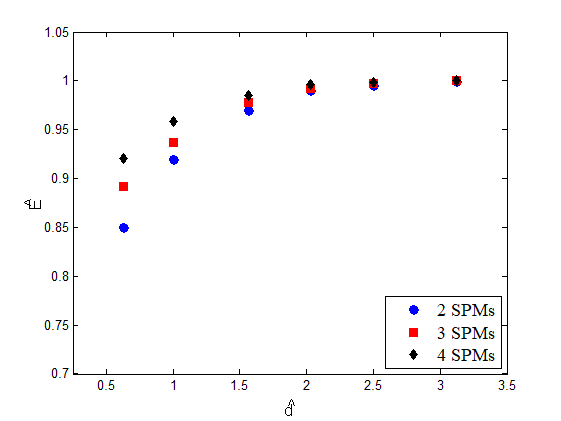
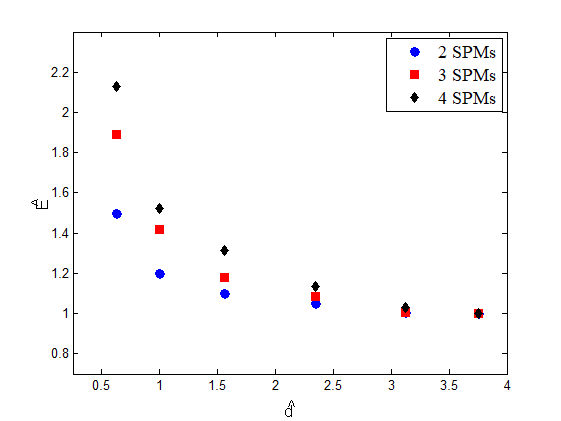
Swarm motion is an amazing collective behavior in nature for energy saving. Inspiring this natural phenomenon in microorganisms’ swimming, we have proposed a motion strategy for a swarm of microrobots to reduce their energy consumption during path tracking. The investigated microrobot is an artificial Self-Propelled Microswimmer (SPM) with high maneuverability at low Reynolds number flow (Re ≪ 1). In this study, we have demonstrated that forming a swarm behavior with minimum energy consumption requires the microswimmers to be close enough to each other, since at small distances the hydrodynamic interactions of microswimmers reduce their energy consumption. Moreover, we also showed that depending on the employed path-tracking control strategy, collective motion may lead to decrease or increase of the overall energy consumption. To save energy using swarm behavior, the microswimmers must be able to adapt their orientation according to the surrounding flow field which is induced by the other swimmers. Otherwise, the energy consumption due to the induced hydrodynamic forces and torques increases. Based on the conducted simulations, it has been shown that the proposed motion strategy minimizes the energy consumption of swarm microswimmers during path tracking.
Project members: Hossein Abdi
Publication: Abdi, H., H. Nejat Pishkenari. “Controlled swarm motion of self-propelled microswimmers for energy saving.” Journal of Micro-Bio Robotics (2021): 1-11.

AI Website Creator