Capsule endoscopy is a widely recognized minimally invasive diagnostic procedure that facilitates enhanced visualization of the digestive system compared to traditional endoscopy methods. Unlike conventional endoscopes, capsule endoscopy allows for the examination of the small intestine. However, existing capsules lack the capability to perform biopsies during the procedure, limiting the potential for comprehensive diagnostic analyses. The objective of this project is to address this limitation by designing a novel capsule equipped with a biopsy tool. This innovative capsule can be controlled through external magnetic fields, which also activate its biopsy mechanism. A prototype is developed using the concept of magnetic springs. Additionally, a conventional biopsy forceps is integrated into the capsule design, providing physicians with increased convenience for utilizing the new biopsy functionality.
As of now, the project is in the detailed design phase, and the concept has been verified through simulations and initial experimental tests. The integration of a biopsy tool into the capsule has the potential to significantly enhance the diagnostic capabilities of capsule endoscopy, paving the way for more comprehensive and targeted medical assessments within the digestive system.
keywords: capsule robot, magnetic actuation, biopsy capsule
Project members: Mohammad Reza Zarifi , Zahra Tolouei , Masoud Yousefi
This video illustrates the operational principles of the proposed biopsy capsule. The capsule's design incorporates two radial magnets, one of which is stationary in both location and orientation, while the other is free to translate and rotate along the axis of the capsule. Upon applying an external magnetic field, the free magnet undergoes rotation to align itself with the external field. As a result, it moves away from the fixed magnet, propelled by the repulsive force between them.
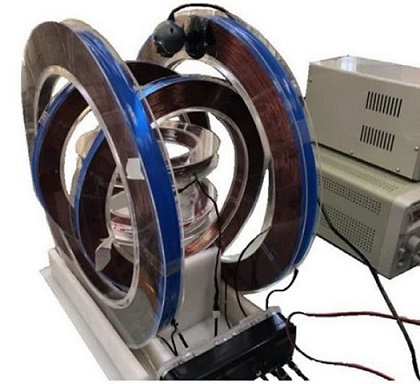
This video showcases the experimental evaluation of our conceptual design. The capsule has been prototyped using 3D printing, and the external magnetic field is applied through the use of two Helmholtz coils.

No Code Website Builder